


Προκλήσεις και προτάσεις
Η μειωμένη αυτονομία των UAV λόγω μιας πληθώρας τεχνολογικών και περιβαλλοντικών περιορισμών και αντίληψης των αισθητήρων τους, αποτελεί μια μείζονος σημασίας πρόκληση των ερευνητών στις επιχειρήσεις SAR, κυρίως λόγω της κρισιμότητας του χρόνου. Από τη βιβλιογραφική ανασκόπηση εντοπίζονται οι εξής περιπτώσεις:
Χαρτογράφηση της περιοχής και Σχεδιασμός πτήσης
Κατά τη διάρκεια των αποστολών SAR τα χαρακτηριστικά του εδάφους μπορεί να έχουν αλλάξει σημαντικά (π.χ. μετά από κατολισθήσεις ή πλημμύρες). Ο τοπικός χάρτης της περιοχής θα πρέπει να ανασυγκροτηθεί για να εγγυηθεί την ασφάλεια της ομάδας SAR και να συντομεύσει το χρόνο διάσωσης. Η βελτιστοποίηση των υφιστάμενων αλγόριθμων χαρτογράφησης αποτελούν θέμα ευρείας συζήτησης μεταξύ των ερευνητών.
Οι περιορισμένες ενεργειακές δυνατότητες των UAV σε ότι αφορά τη χρονική διάρκεια πτήσης τους, που τις περισσότερες φορές δεν επαρκούν για να καλύψουν ολόκληρη την περιοχή αναζήτησης, αποτελούν σημαντική παράμετρο μελέτης. Επίσης, και οι αισθητήρες (π.χ. κάμερες) έχουν περιορισμένο χρόνο λειτουργίας λόγω της περιορισμένης διάρκειας της μπαταρίας τους. Όμως, όταν ένα UAV χρησιμοποιείται στη λειτουργία αναζήτησης και διάσωσης, είναι επιθυμητό να μεγιστοποιηθεί η διάρκεια του χρόνου, επειδή η ανάκτηση, η προετοιμασία για άλλη πτήση και η επανεγκατάσταση μπορεί να είναι πολύ χρονοβόρα. Η βασική πρόκληση και ο στόχος των ερευνητών είναι η επίλυση ενός ευφυούς προβλήματος διαδρομής πτήσης, που να παρέχει στους ενσωματωμένους αισθητήρες του UAV τη δυνατότητα να καλύψουν όσο το δυνατόν περισσότερους σημαντικούς τομείς, εντός του επιτρεπόμενου χρόνου πτήσης. Δηλαδή, ο χάρτης διανομής πιθανοτήτων, να χρησιμοποιείται από τους αλγόριθμους προγραμματισμού, οι οποίοι θα παράγουν αυτόματα το σχέδιο πτήσης διασφαλίζοντας ότι θα αναζητηθούν πρώτα οι περιοχές με υψηλές πιθανότητες ανεύρεσης ενός αγνοούμενου προσώπου, κάνοντας την αναζήτηση όσο πιο αποτελεσματική γίνεται. Παράλληλα, και οι στρατηγικές επιλογές του χειριστή πρέπει να δίνουν στο UAV τη δυνατότητα να δημιουργεί γρήγορα επικαιροποιημένους χάρτες διανομής πιθανοτήτων.
Η αναζήτηση συνεχίζεται στην οριοθέτηση των περιοχών δεύτερης προτεραιότητας για περαιτέρω πτήσεις UAV. Η χρησιμότητα εργαλείων (π.χ. τα GIS) στις επιχειρήσεις SAR για την κατάρτιση των χαρτών διανομής πιθανοτήτων ή ως πλατφόρμα για την ενσωμάτωση στοιχείων σχετικά με το συμπεριφοριστικό προφίλ του αγνοούμενου για την υποστήριξη της διαδικασίας αναζήτησης αποτελούν επίσης θέματα προσανατολισμού της έρευνας.
Στις αποστολές SAR από χιονοστιβάδες το σχέδιο πτήσης τροποποιείται με βάση την ένταση του σήματος που ανιχνεύεται, χρησιμοποιώντας τις συνήθεις μεθόδους και διαδικασίες για τη διάσωση αυτού του είδους, λαμβάνοντας υπόψη τη κρισιμότητα του χρόνου. Οι εφαρμογές SAR γι αυτές τις περιπτώσεις, είναι σήμερα πολύ λίγες και δεν φαίνεται να υπερβαίνουν το προκαταρκτικό επίπεδο του πρωτοτύπου.
 Η γρήγορη κάλυψη (ταχεία χαρτογράφηση εδάφους) και η ανίχνευση (εντοπισμός θυμάτων) είναι δύο βασικοί στόχοι για την αποτελεσματικότητα των επιχειρήσεων SAR. Ωστόσο, υπάρχει «ένταση» μεταξύ αυτών των στόχων, ιδίως στις επιχειρήσεις wiSAR. Η ταχεία χαρτογράφηση μιας περιοχής μπορεί να μην είναι τόσο λεπτομερής για τον εντοπισμό ατόμων. Αντιστρόφως, η πιο αργή χαρτογράφηση θα βοηθήσει στον εντοπισμό του ατόμου αλλά σε ένα μη αποδεκτό χρονικό διάστημα για επιχειρήσεις SAR. Η εξεύρεση του λειτουργικού συμβιβασμού μεταξύ «κάλυψης» και «ανίχνευσης» είναι ένα βασικό πρόβλημα που αντιμετωπίζουν οι ερευνητές. Η πιθανότητα ανίχνευσης ενός ατόμου ως βασικός παράγοντας στην αποτελεσματικότητα της αναζήτησης μεταφράζεται με ένα πρακτικό περιορισμό. Δηλαδή, το UAV μπορεί να πετάξει τόσο ψηλά όσο η ανθρώπινη μορφή βρίσκεται στα όρια της αναγνώρισης από τον οπτικό αισθητήρα. Αν η απαίτηση ανίχνευσης της ανθρώπινης μορφής εγκαταλειφθεί και αναζητηθούν άλλα στοιχεία αναγνώρισης όπως ασυνήθιστα χρώματα από ρούχα και άλλα τεχνητά αντικείμενα το ύψος του UAV μπορεί να φθάσει σε υψηλότερα επίπεδα. Συνεπώς, το σχέδιο πτήσης πάνω από μια περιοχή θα πρέπει να προγραμματίζεται έτσι ώστε να λειτουργεί σε υψόμετρα που είναι κατάλληλα για την οπτική αναγνώριση των αισθητήρων.
Η γρήγορη κάλυψη (ταχεία χαρτογράφηση εδάφους) και η ανίχνευση (εντοπισμός θυμάτων) είναι δύο βασικοί στόχοι για την αποτελεσματικότητα των επιχειρήσεων SAR. Ωστόσο, υπάρχει «ένταση» μεταξύ αυτών των στόχων, ιδίως στις επιχειρήσεις wiSAR. Η ταχεία χαρτογράφηση μιας περιοχής μπορεί να μην είναι τόσο λεπτομερής για τον εντοπισμό ατόμων. Αντιστρόφως, η πιο αργή χαρτογράφηση θα βοηθήσει στον εντοπισμό του ατόμου αλλά σε ένα μη αποδεκτό χρονικό διάστημα για επιχειρήσεις SAR. Η εξεύρεση του λειτουργικού συμβιβασμού μεταξύ «κάλυψης» και «ανίχνευσης» είναι ένα βασικό πρόβλημα που αντιμετωπίζουν οι ερευνητές. Η πιθανότητα ανίχνευσης ενός ατόμου ως βασικός παράγοντας στην αποτελεσματικότητα της αναζήτησης μεταφράζεται με ένα πρακτικό περιορισμό. Δηλαδή, το UAV μπορεί να πετάξει τόσο ψηλά όσο η ανθρώπινη μορφή βρίσκεται στα όρια της αναγνώρισης από τον οπτικό αισθητήρα. Αν η απαίτηση ανίχνευσης της ανθρώπινης μορφής εγκαταλειφθεί και αναζητηθούν άλλα στοιχεία αναγνώρισης όπως ασυνήθιστα χρώματα από ρούχα και άλλα τεχνητά αντικείμενα το ύψος του UAV μπορεί να φθάσει σε υψηλότερα επίπεδα. Συνεπώς, το σχέδιο πτήσης πάνω από μια περιοχή θα πρέπει να προγραμματίζεται έτσι ώστε να λειτουργεί σε υψόμετρα που είναι κατάλληλα για την οπτική αναγνώριση των αισθητήρων.
Βελτιστοποίηση υπολογιστικής όρασης των αισθητήρων
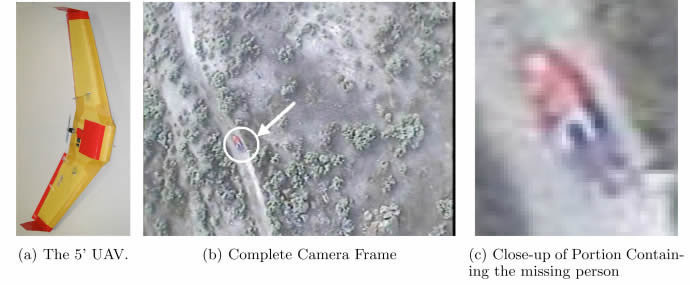
Οι εικόνες που λαμβάνονται από τους αισθητήρες των UAV παρουσιάζουν σημαντικά προβλήματα που καθιστούν πολύ δύσκολο για τον άνθρωπο να αναγνωρίσει και να εντοπίσει χαρακτηριστικά ή αντικείμενα ενδιαφέροντος.
Οι περιορισμοί ανίχνευσης του αντικειμένου από τους αισθητήρες σχετίζονται και με τις περιβαλλοντικές και μετεωρολογικές συνθήκες (π.χ. πυκνότητα της βλάστησης, συνθήκες φωτισμού, καιρικές συνθήκες κλπ). Κρίσιμα δεδομένα μπορεί να μην αναγνωριστούν ή να έχουμε ψευδείς συναγερμούς. Η ανίχνευση των ανθρώπων στις εικόνες είναι ένα δύσκολο πρόβλημα και δοκιμές πεδίου έχουν δείξει έλλειψη αποτελεσματικής διαδικασίας. Παρόλο που έχει σημειωθεί σημαντική πρόοδος σε ειδικευμένους τομείς όπως η ανίχνευση των πεζών, οι περισσότερες προσεγγίσεις λειτουργούν καλύτερα όταν οι άνθρωποι είναι πλήρως ορατοί και εμφανίζονται σε περιορισμένο εύρος θέσεων όπως η στάση ή το περπάτημα. Πολλά μοντέλα έχουν παρουσιαστεί με την εφαρμογή και την επέκταση διαφόρων αλγορίθμων του ορατού φάσματος της υπολογιστικής όρασης ενσωματώνοντας χαρακτηριστικά κίνησης και χρώματος, ανίχνευσης άνω μέρους του σώματος, εμποδίων σε κινητά περιβάλλοντα κ.λπ. Όμως, τα μοντέλα αυτά συχνά, δεν δύναται να γενικευθούν στα σύνθετα σενάρια των επιχειρήσεων έρευνας και διάσωσης και προκαλούνται αποκλίσεις και διακυμάνσεις στις θέσεις των ανθρώπων.

Στη βιβλιογραφία θα συναντήσουμε και ένα σώμα γνώσης που χρησιμοποιεί άλλους τύπους αισθητήρων. Δεδομένου ότι πολλά UAV είναι εξοπλισμένα με σαρωτές lazer, έχουν καταβληθεί σημαντικές προσπάθειες για τη χρήση τους στην ανίχνευση ανθρώπων. Οι θερμικές κάμερες προσφέρουν ένα τεράστιο πλεονέκτημα στη νυχτερινή επιτήρηση (όπως αποδεικνύεται από την εκτεταμένη χρήση τους από τη στρατιωτική και την επιβολή του νόμου), αλλά ισχύουν και για την παρακολούθηση κατά τη διάρκεια της ημέρας. Σε κάθε περίπτωση, που οι θερμικές ιδιότητες ενός ατόμου είναι διαφορετικές από το φόντο, οι περιοχές προσώπων μπορούν να ανιχνευθούν.
Οι θερμικές εικόνες έχουν χρησιμοποιηθεί εκτενώς για την ανίχνευση ανθρώπων χρησιμοποιώντας είτε ειδικά σχεδιασμένες μεθόδους, είτε εφαρμόζοντας απευθείας μεθόδους που σχεδιάστηκαν αρχικά για την ανίχνευση σε εικόνες του ορατού φάσματος. Επιπλέον, ελαχιστοποιούνται τα παραδοσιακά προβλήματα ηλεκτρονικής όρασης που σχετίζονται με σκιές. Ωστόσο, δοκιμές πεδίου που παρουσιάζουν την καταγραφή υπαίθριων θερμικών εικόνων επιτήρησης της ίδιας σκηνής, αλλά ελήφθησαν σε διαφορετικές μέρες (το πρωί και το απόγευμα), αποδεικνύουν ότι οι συνήθεις θερμικοί αισθητήρες έχουν τις δικές τους μοναδικές προκλήσεις στα παραγόμενα αποτελέσματα (π.χ. χαμηλές αλλαγές SNR, λευκού / μαύρου / ψυχρού πολικού που εμφανίζονται γύρω από πολύ ζεστά ή κρύα αντικείμενα). Τούτο, μπορεί να ανατρέψει την αρχική υπόθεση ότι η περιοχή του σώματος είναι πολύ θερμότερη/φωτεινότερη από το υπόβαθρο, καθιστώντας τη διαδικασία αναποτελεσματική για την ανίχνευση των ακριβών θέσεων και μορφών των ανθρώπων. Η συλλογή των προβλημάτων που σχετίζεται με τους οπτικούς αισθητήρες δημιούργησε στους ερευνητές την ανάγκη για την αντιμετώπισή τους, με τη συνεργασία διαφόρων τύπων αισθητήρων ή μέσω του σχεδιασμού κατάλληλων αλγορίθμων ή βελτιστοποίησης υφιστάμενων αλγόριθμων ταυτοποίησης και αναζήτησης.