Τα Drones, όπως και τα υπόλοιπα «ιπτάμενα μέσα», διαχωρίζονται με βάση τον τρόπο με τον οποίο γίνεται η παραγωγή της άντωσης. Με βάση αυτόν το διαχωρισμό μπορούμε να διακρίνουμε δύο ειδών πτητικά μέσα: τα αεροσκάφη σταθερών πτερύγων και τα αεροσκάφη περιστρεφόμενων στροφείων.
{kind=link}
{kind=link}
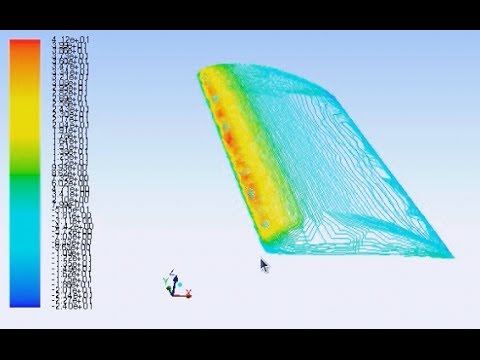
Το ελικόπτερο μπορεί να προσδιοριστεί ως μια πτητική μηχανή η οποία χρησιμοποιεί περιστρεφόμενα πτερύγια για να παράγει άντωση, πρόωση και έλεγχο. Παρότι όπως αναφέρθηκε οι αεροδυναμικές αρχές που διέπουν την πτήση του ελικοπτέρου, είναι ίδιες με αυτές του αεροπλάνου, ωστόσο, στο ελικόπτερο οι αεροδυναμικές δυνάμεις παράγονται από την σχετική κίνηση της επιφανείας του περιστρεφόμενου πτερυγίου σε σχέση με τον αέρα.
{kind=link}
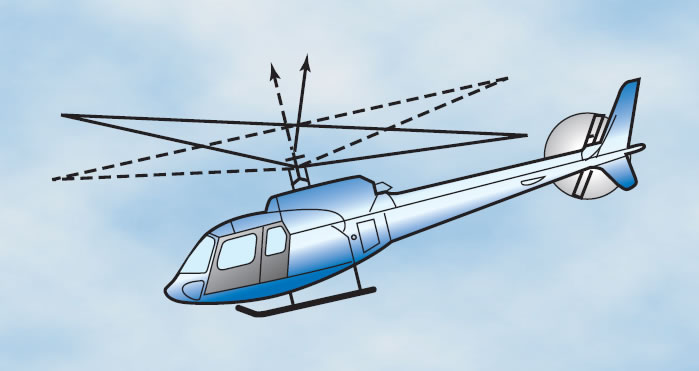
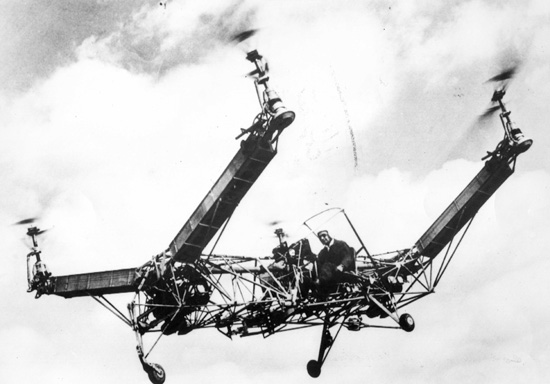
Τα ελικόπτερα που έχουν ένα κύριο και ένα ουραίο στροφείο αποτελούν τον πιο συνηθισμένο τύπο ελικοπτέρων, παρότι υπάρχουν και άλλες λύσεις για την αντιστάθμιση της ροπής του κύριου στροφείου. Στη μία λύση χρησιμοποιούνται δύο συγχρονισμένα κύρια στροφεία, τα οποία περιστρέφονται σε αντίθετες κατευθύνσεις. Η αντίθετη περιστροφή έχει σαν αποτέλεσμα να ακυρώνεται η ροπή που δημιουργεί το ένα στροφείο από τη ροπή που δημιουργεί το άλλο με αποτέλεσμα να μην υπάρχει ανάγκη για ουραίο στροφείο. Σε μια δεύτερη διαμόρφωση ελικοπτέρων, έχουμε δύο ομοαξονικά στροφεία. Η ροπή της ατράκτου αντισταθμίζεται με τη χρήση δύο στροφείων που περιστρέφονται αντίθετα και είναι τοποθετημένα το ένα πάνω από το άλλο σε έναν κοινό άξονα.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Αρχές πτητικής λειτουργίας τετρακόπτερου
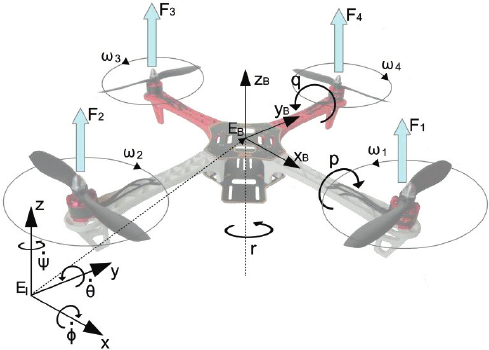
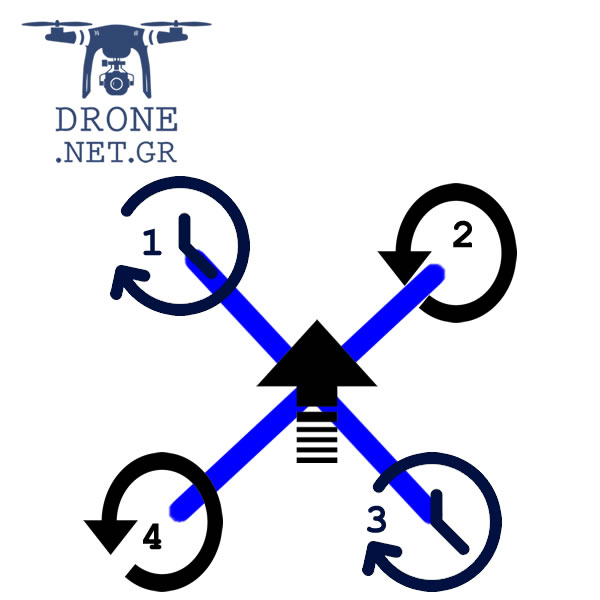
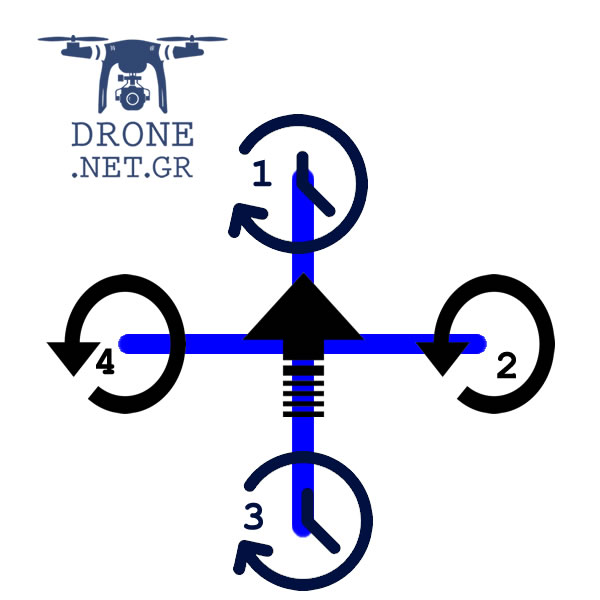
Τα τετρακόπτερα κατατάσσονται στην κατηγορία των μη επανδρωμένων αεροσκαφών (UAV) περιστρεφόμενων στροφείων. Αποτελούνται από τέσσερα στροφεία/ρότορες τοποθετημένους σε ίσες αποστάσεις και συμμετρικά κατανεμημένα από το κέντρο μάζας του τετρακόπτερου. Ο έλεγχος πραγματοποιείται με αλλαγή της ταχύτητας του κάθε στροφείου/ρότορα οι οποίοι λειτουργούν με κίνηση από ισάριθμα ηλεκτρικά μοτέρ. Όπως προαναφέρθηκε, στα κλασσικά ελικόπτερα η ροπή που παράγεται από το κεντρικό στροφείο αντισταθμίζεται από έναν επιπλέον στροφείο στην ουρά του ελικοπτέρου ώστε να εξισορροπούνται οι γυροσκοπικές αντιδράσεις της ατράκτου. Στην περίπτωση του τετρακόπτερου, ο έλεγχος γίνεται ευκολότερος εφόσον η κίνηση του αεροσκάφους δεν εξαρτάται από τα γυροσκοπικά φαινόμενα, αφού τα δύο στροφεία στρέφονται κατά την φορά των δεικτών του ρολογιού (δεξιόστροφα) ενώ οι υπόλοιποι δύο αντίθετα με την φορά των δεικτών του ρολογιού (αριστερόστροφα), απαλείφοντας με αυτό τον τρόπο τα γυροσκοπικά φαινόμενα. Τα τετρακόπτερα έχουν διατεταγμένα τα στροφεία τους σε δύο διατάξεις ανάλογα με τη κατεύθυνση της πτήσης: σε διάταξη “+” και “X”.
{kind=link}
{kind=link}
Και στις δύο διατάξεις οι κινητήρες 1 και 3 περιστρέφονται δεξιόστροφα, ενώ οι κινητήρες 2 και 4 αριστερόστροφα. Οι έλικες που στερεώνονται στους κινητήρες 1 και 3 έχουν αντίθετη κλίση από τις έλικες που στερεώνονται στους κινητήρες 2 και 4, αφενός μεν για να δίνουν όλες ώθηση προς την ίδια κατεύθυνση και αφετέρου για να αλληλοαναιρούν τα γυροσκοπικά φαινόμενα που δημιουργούνται. Η κίνηση του τετρακόπτερου, όπως ήδη αναφέρθηκε, εξαρτάται από την ταχύτητα των κινητήρων. Με την αλλαγή της ταχύτητας αλλάζουν και οι δυνάμεις ώσης με αποτέλεσμα την παραγωγή κίνησης, ενώ αυξάνοντας ή μειώνοντας την ταχύτητα όλων των κινητήρων το τετρακόπτερο μπορεί να κινείται κάθετα.
Παρά την συμμετρική κατανομή των κινητήρων και των φορτίων στην άτρακτο του τετρακόπτερου και την αντίθετη κίνηση των στροφείων, ο σχεδιασμός τους είναι τέτοιος που δεν τους παρέχει σταθερή πτήση και για αυτό τον λόγο απαιτείται η ύπαρξη ενός υπολογιστικού συστήματος που θα συμπληρώνει τα αεροδυναμικά χαρακτηριστικά και θα σταθεροποιεί την πτήση. Το ηλεκτρονικό –υπολογιστικό σύστημα αυτό είναι γνωστό ως «fligh controller». Ο flight controller λαμβάνει τα στοιχεία λειτουργίας από τα ηλεκτρονικά στοιχεία (γυροσκόπιο, επιταχυνσιόμετρο, GPS κλπ) του τετρακόπτερου και μετά την επεξεργασία τους παρέχει εντολές διόρθωσής στα συστήματα ελέγχου ώστε να υπάρχει σταθερότητα στην κίνηση αλλά και έλεγχος του συστήματος.
Ένα τετρακόπτερο μπορεί να κινηθεί σε τρεις βασικές διευθύνσεις: εμπρός – πίσω, αριστερά – δεξιά και πάνω-κάτω. Όπως προαναφέρθηκε, όλες οι κινήσεις αυτές γίνονται με την αυξομείωση των κινητήρων τους οποίους διαθέτει το τετρακόπτερο. Για παράδειγμα, όταν δίνεται η εντολή για την κίνηση προς τα εμπρός ενός τετρακόπτερου σε διάταξη «Χ», ο flight controller μειώνει την ταχύτητα των κινητήρων 1 και 2 και αυξάνει την ταχύτητα των κινητήρων 3 και 4. Η κίνηση προς τα δεξιά πραγματοποιείται με αύξηση της ταχύτητας των κινητήρων 1, 4 και με αντίστοιχη μείωση της ταχύτητας των 2 και 3. Επίσης, για την περιστροφή γύρω από τον κάθετο άξονα προς τα δεξιά αυξάνεται η ταχύτητα του αριστερού εμπρός και δεξιού πίσω (κινητήρας 1 και 3) ενώ μειώνεται η ταχύτητα των άλλων δύο (κινητήρας 2 και 4). Τέλος, όταν δοθεί εντολή για άνοδο τότε αυξάνεται η ταχύτητα και των τεσσάρων κινητήρων ενώ αντίστοιχα όταν απαιτηθεί κάθοδος τότε μειώνεται η ταχύτητα και των τεσσάρων κινητήρων.
{kind=link}
Στο παρόν άρθρο έγινε μία προσπάθεια συνοπτικής παρουσίασης των βασικών αρχών αεροδυναμικής των αεροσκαφών σταθερών πτερύγων και των αεροσκαφών περιστρεφόμενων στροφείων, εστιάζοντας στα μη επανδρωμένα αεροσκάφη πολλαπλών περιστρεφόμενων στροφείων και ειδικότερα στα τετρακόπτερα. Θα πρέπει να τονιστεί όμως ότι η ανάλυση του αεροδυναμικού μοντέλου του τετρακόπτερου, του flight controller και των αισθητήρων που χρησιμοποιεί για την ευστάθεια του, τον προσανατολισμό και τον έλεγχο του κατά την πτήση είναι ένα πολυσύνθετο πρόβλημα που απαιτεί σημαντικό γνωστικό υπόβαθρο Μαθηματικών, Αεροδυναμικής αλλά και Συστημάτων Αυτομάτου Ελέγχου.